Ingenieros estadounidenses han desarrollado un sistema de acoplamiento automático para barcos, lo que les permite potencialmente unirse en grandes estructuras, por ejemplo, ferris temporales. Los desarrolladores probaron el sistema en dos robots y presentaron los resultados en la conferencia ICRA 2019.
El proyecto Roboat fue presentado en 2016 por ingenieros del Instituto de Tecnología de Massachusetts (MIT) y el Instituto de Soluciones Urbanas Avanzadas de Ámsterdam. El objetivo del proyecto es crear pequeños buques autónomos que puedan limpiar de forma independiente el fondo de los canales de Ámsterdam. Además, los ingenieros sugieren usar tales robots para crear cruces temporales a través de los canales.
Para la segunda tarea, los robots deben ser capaces no solo de moverse independientemente a través del canal, sino también de acoplarse de forma autónoma, formando una estructura grande y única. Daniela Rus y sus colegas del MIT han creado una estación de acoplamiento y un algoritmo para robots que les permiten atracar de forma autónoma incluso si el agua está picada.
Los roboats
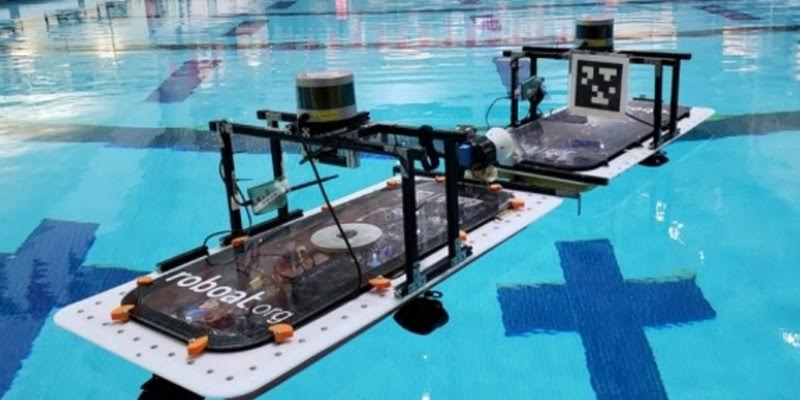
El Roboat es una pequeña nave rectangular que mide 100 x 50 centímetros con cuatro motores, que están ubicados en el centro de cada lado de la caja y forman dos pares, cada uno de los cuales tiene tornillos ubicados en el mismo plano. Gracias a esto, el robot puede controlar rápidamente su movimiento hacia adelante o hacia atrás, así como rotar. Para la orientación mutua, cada robot está equipado con una cámara de profundidad, un lidar y un código QR fijo verticalmente en el cuerpo.
Finalmente, los robots están equipados con unidades de acoplamiento activo-pasivo, que consta de dos partes. Una parte es un cono con una punta esférica y la segunda es un embudo con un sistema de detección de punta láser y un bloqueo electromecánico. Este es un diseño relativamente simple que le permite cambiar el ángulo entre los robots en cualquier dirección. Por ejemplo, en presencia de olas o corrientes diferentes, los robots pueden no estar ubicados en paralelo, sino con un ligero ángulo.
El embudo en la unidad de acoplamiento permitió simplificar el modelo de tridimensional a bidimensional, porque incluso con una fuerte falta de coincidencia de la altura de los robots, es probable que la punta del cono caiga en el embudo. El algoritmo utilizado por los ingenieros para el acoplamiento es bastante simple y consta de dos etapas principales.
Primero, un robot activo minimiza el ángulo de desajuste entre él y el robot pasivo. Durante esta etapa, los robots no se acercan entre sí a menos de un metro de distancia y minimizan el desajuste. Una vez que se ha vuelto más pequeño que los bordes del embudo, el robot activo comienza a avanzar hacia el acoplamiento. Hasta ahora, los ingenieros han probado solo un par de robots, pero en el futuro planean usarlos para crear un gran cruce de varios vehículos.
El concepto de comportamiento colectivo e integración en grandes estructuras también se utiliza en robots que operan en otros entornos. Por ejemplo, hay drones que se pueden combinar en una gran estructura, así como robots modulares, además de combinar quién puede usar las herramientas disponibles.